Case Study
Drone Magnetometer Survey
Geo-4D were tasked with locating unexploded ordnance (UXO) in shallow nearshore waters in Bahrain, to assist with the installation of three submarine power cables.
A history of military training in the region has resulted in a risk of triggering unexploded ordnance during cable installation works. With this in mind, a full-coverage magnetometer survey was required to identify, characterise and, if necessary, remove or detonate any UXO found along the cable routes.
The main challenge to the project was that the Persian Gulf has a negligible tidal range, meaning that survey vessels could not safely access and survey in waters shallower than 2m using a towed magnetometer setup.
Three shallow water areas along the proposed cable routes required UXO clearance: two landfalls (shore to 2m water depth), and a shallow-water reef feature approximately 4km from shore, with water depths as shallow as 0.2m.
UAV Survey
To conduct full coverage UXO survey in the shallow water areas, Geo-4D proposed a drone-based solution using an RTK-positioned multirotor unmanned aerial vehicle (UAV), a dual-fluxgate magnetometer and a radar altimeter to maintain a constant fly height above the water’s surface.
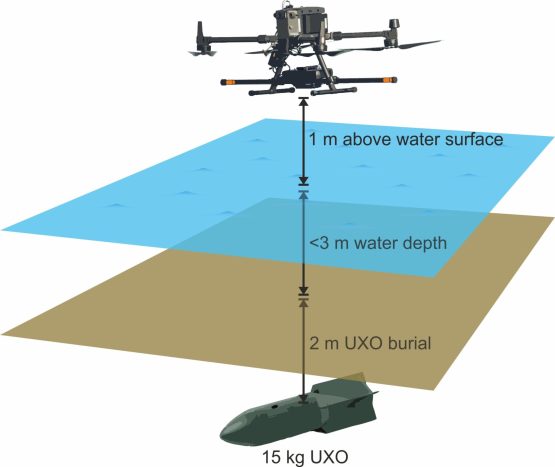
The UAV was flown 1m above the water at a speed of 5m/s on a 2m spaced predetermined grid. The magnetometers record data at 200 readings per second to provide rapid full-coverage UXO clearance data. The nearshore areas were surveyed from the beach, with the offshore reef surveyed from a local supply vessel.
Prior to performing the magnetometer survey, a surrogate item trial was performed onsite and it was determined that the hardware configuration could detect a 15kg ordnance item at approximately 6m distance. This enabled UXO survey coverage to 2m burial in water depths of up to 3m.
Data Processing and Outputs
The resultant raw measurements of magnetic field (total magnetic field) comprised a composite of background and hardware/system magnetic signatures. Background magnetic signatures include the earth’s magnetic field, local geological effects and diurnal variations. System magnetic noise was primarily from the UAV motors.
Processing was initially performed in proprietary software from the magnetometer manufacturer to remove hardware noise. Further data cleaning and filtering was then performed in Oasis Montaj software to derive the required residual field anomaly map. The final processed data was subject to no more than 1-2nT of noise.
Magnetic anomalies were reviewed by the UXO consultant in order to compile a list of potential UXO targets, which were then investigated by a dive team.
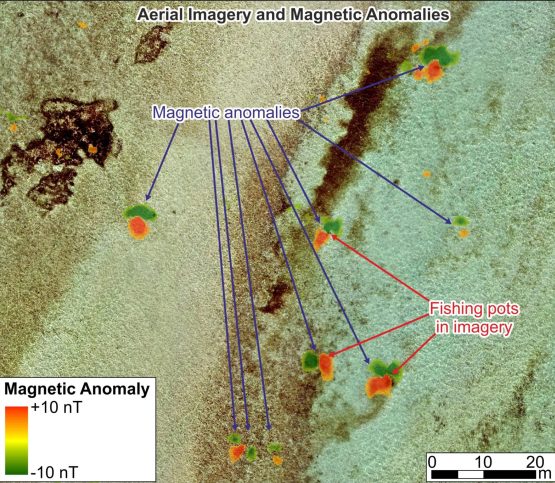
To assist in the characterisation of magnetic anomalies, an aerial photogrammetry survey was also performed using an RGB camera to derive stitched aerial imagery from which to interpret seafloor features. Numerous magnetic anomalies corresponded with fishing pots, fish traps and debris, which allowed the UXO consultant to focus on investigating the remaining unidentified anomalies.
Ultimately, the UAV magnetometer solution provided a safe, rapid and accurate means to achieve full data coverage in shallow water conditions for UXO risk mitigation purposes and ALARP certification. The accompanying aerial imagery also provided a valuable dataset to assist in interpreting magnetic anomalies as potential UXO or seafloor debris.
Request a call back with us, and we will do the rest
Interested in what we do? Need more information.
Geoconsulting, remote sensing
and survey experts
Links
Receive a call back.
Get in touch with us
Navigation
Useful Information
